




Описание
MIT машина собака мотор (по индивидуальному заказу)
ПолыйV1 версия: HT-01 (временно распродано)
Закрытый обновленияV2 версия: HT-02 моторы для собак-роботов (Полка, обеспечивающая различные спецификации!)
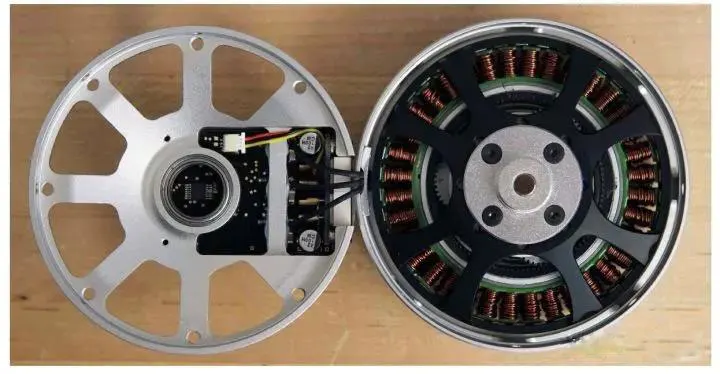
Характеристики 1: V2 мотор + 6: 1 редуктор + CAN драйвер
Крутящий момент: 1,27 нм * 6 (Передаточное отношение) = 7,62 нм.
Коробка передач механического мотора собаки MIT принимает планетарную схему уменьшения передач с коэффициентом уменьшения 6:1.




* Общий эффект интеграции компактного и легкого двигателя, см. Следующий рисунок:


* Встроенный Магнитный энкодер для измерения информации о положении двигателя, 15 бит




* Общая конструкция конструкции должна соответствовать следующим двум принципу:
1, уменьшить инерцию ноги и качество
2. Увеличьте рабочее пространство для ног
Уменьшите инерцию, используйте более обычное расположение верхней части привода (вдали от земли), одиночная свобода ноги присваивается к традиционной форме наклона, конструкция выглядит следующим образом:

* Характеристики крутящего момента/тока мотора в основном находятся в хорошем линейном соотношении, с погрешностью около 12% при максимальном токе.
* Колено offПосле того, как шаг водителя секции перемещается вверх и вниз, используйте Ременный привод, как показано ниже: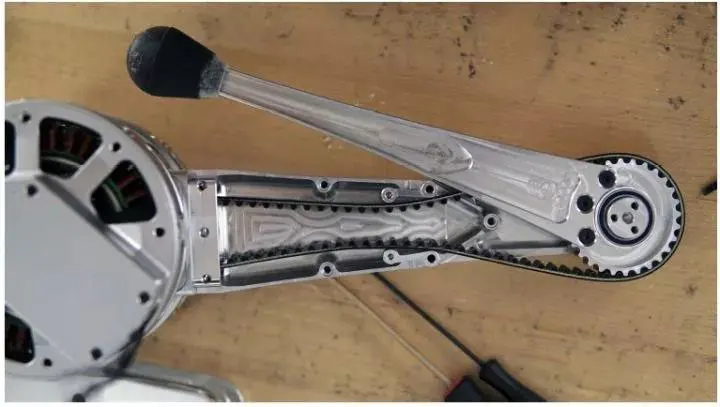
* Для снижения собственного качества облегченная конструкция была подчеркнута путем конечного анализа элементов:
Икроножных мышц дизайн двутавровая балка схема

* Внутренний полый дизайн

* Корпус робота состоит из 1,5 мм 6061 твердого алюминия AL

Характеристики
- Материалы для самостоятельного изготовления
- Электрический
- Номер модели
- HT-02
- Индивидуальное изготовление
- Да
- Voltage
- ≤36V (inclusive)
- MIT machine dog motor
- Motor customization
- communication method
- CAN bus communication
- Integrated motor
- Motor + driver + encoder + reducer + CAN bus
Сопутствующие товары








