


Описание
Механический рычаг 6 свободного манипулятора ABB промышленный робот модель шесть оси робот
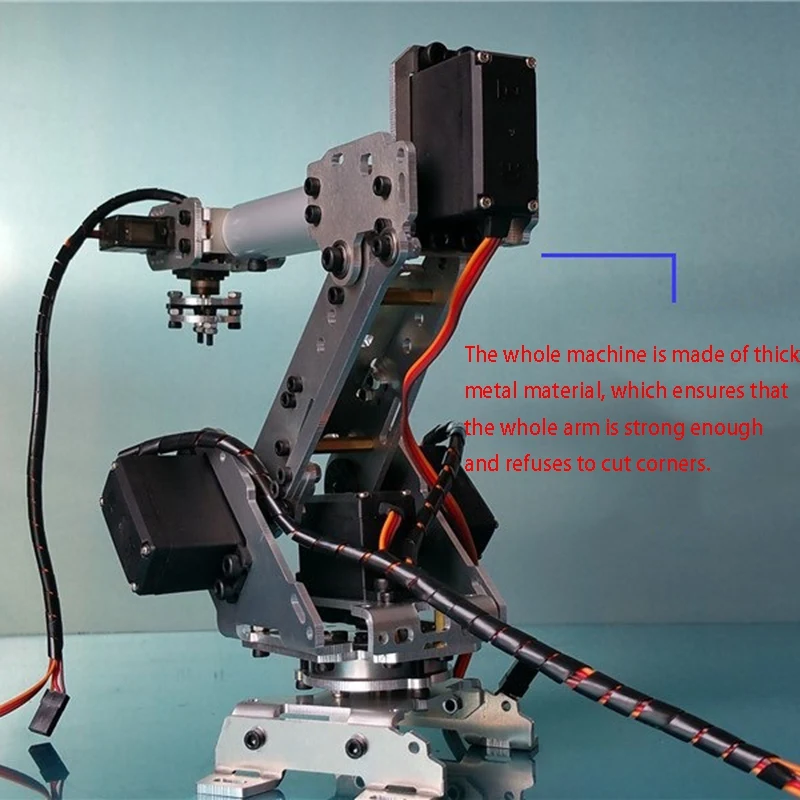
6 градусов свободы манипулятора (обхват талии-бум arm, вращение, наручные, вращение запястья), цельнометаллический манипулятором, дно совместного высокого качества, все из нержавеющей стали большой подшипник, более стабильная работа, различные размеры рук от партии иногда будут очень тонкие изменения. концепция детского дизайна производится от ABB palletizing robot, принцип структуры такой же, Диапазон движения больше, чем у других рычагов того же уровня.
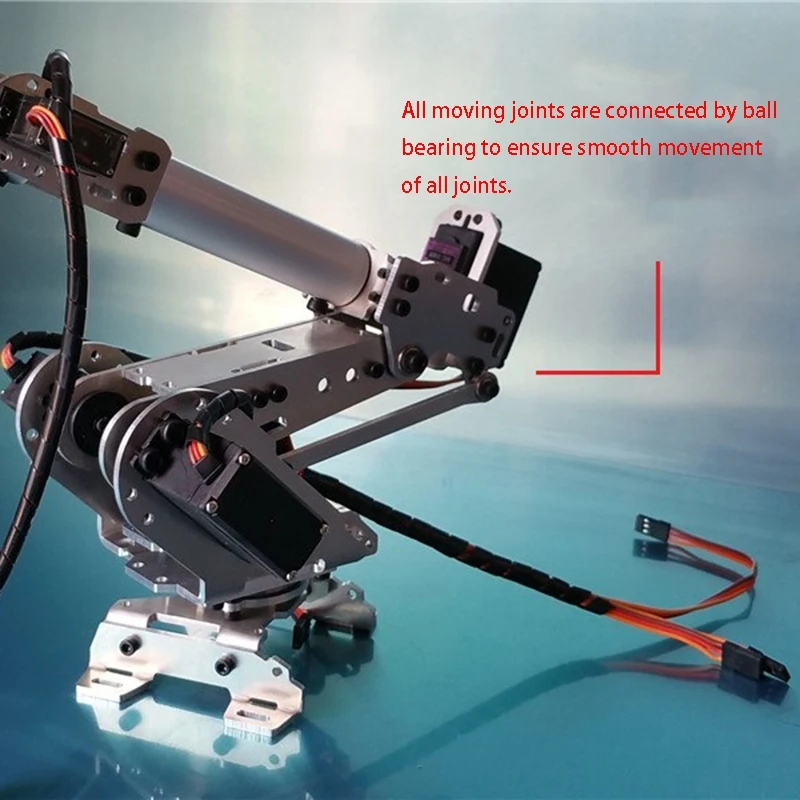
Механическая физика не соответствует нержавеющей стали 1,5 мм. весь рычаг использует 4 MG996R металлические шестерни рулевого управления и 2 MG90S металлические шестерни рулевого управления для обеспечения более длительной мощности. во всех спортивных соединениях используется высококачественный подшипник для лучшей производительности.
В соответствии с общей нагрузкой сервопривода, точно рассчитать размер руки и улучшить механическую производительность руки.
Размер и точность 6 детских дизайнов особенно подходят для обучения и экспериментов. основание для манипулятора фиксируется высококачественным полностью стальным большой подшипник, базовое фиксированное движение руки больше не пробудится, и производительность подшипника нагрузки лучше.
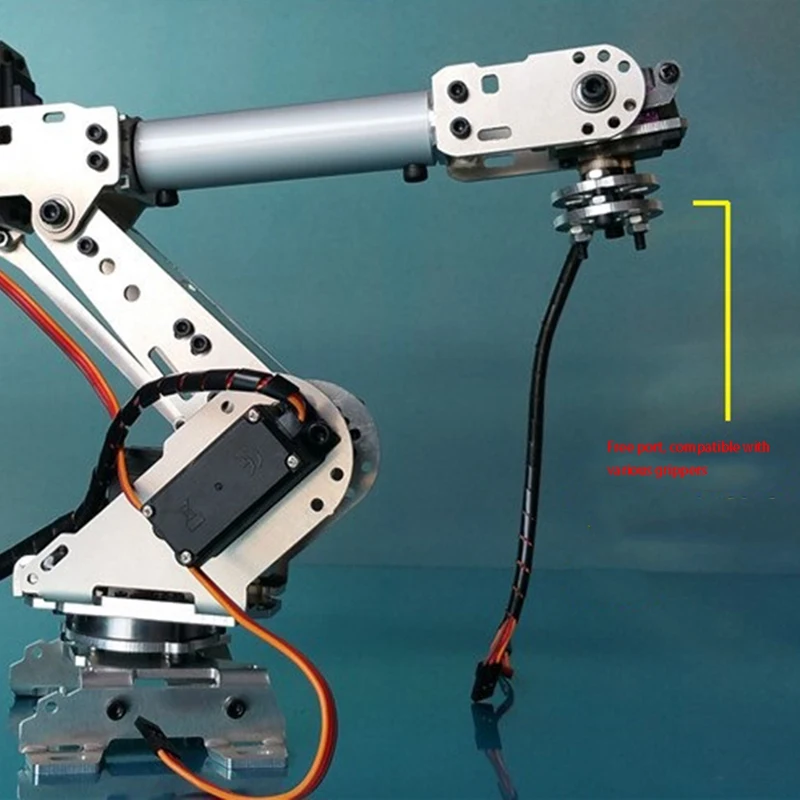
Продукты поставляются стандартными С КРЕПЕЖНОЙ ПЛАСТИНОЙ, пользователи могут продолжить DIY присоска, электромагнит, вилка, коготь, держатель и т. д. в соответствии с характеристиками сырья
Длина руки не максимально длинная. Чем дольше нагрузка на рулевой механизм, тем больше воздействие на срок службы рулевого механизма. Если нагрузка слишком велика, контур рулевого управления выгорит и повредит рулевое колесо. Производительность манипулятора напрямую влияет на определенность. Чем дольше рука, тем меньше нагрузка может быть. Рычаг рассчитан на размер, основанный на нагрузке шестерни универсальной металлической рулевой передачи и нагрузке цепи сервопривода, и производительность рулевого механизма достигается.
Рычаг включает 4 MG966R двухподшипниковые металлические шестерни рулевого управления и 2 MG90S металлические шестерни рулевого управления. Соединения рук соединены подшипниками.
Цвет: серебристый + черный
Материал: металл
Размер: Длина: 245 мм
Посылка в комплект входит:
1 * комплект 6 степенью свободы манипулятора (без упаковки, должны быть в сборе)
Обратите внимание
Требует самостоятельной сборки и отладки пользователя
Только вышеуказанный пакет, другие продукты не включены.
Примечание: световая съемка и различные дисплеи могут привести к тому, что цвет изделия на картинке немного отличается от реального. Допускается погрешность измерения: +/-1-3 см.
Механическая физика не соответствует нержавеющей стали 1,5 мм. весь рычаг использует 4 MG996R металлические шестерни рулевого управления и 2 MG90S металлические шестерни рулевого управления для обеспечения более длительной мощности. во всех спортивных соединениях используется высококачественный подшипник для лучшей производительности.
В соответствии с общей нагрузкой сервопривода, точно рассчитать размер руки и улучшить механическую производительность руки.
Размер и точность 6 детских дизайнов особенно подходят для обучения и экспериментов. основание для манипулятора фиксируется высококачественным полностью стальным большой подшипник, базовое фиксированное движение руки больше не пробудится, и производительность подшипника нагрузки лучше.
Продукты поставляются стандартными С КРЕПЕЖНОЙ ПЛАСТИНОЙ, пользователи могут продолжить DIY присоска, электромагнит, вилка, коготь, держатель и т. д. в соответствии с характеристиками сырья
Длина руки не максимально длинная. Чем дольше нагрузка на рулевой механизм, тем больше воздействие на срок службы рулевого механизма. Если нагрузка слишком велика, контур рулевого управления выгорит и повредит рулевое колесо. Производительность манипулятора напрямую влияет на определенность. Чем дольше рука, тем меньше нагрузка может быть. Рычаг рассчитан на размер, основанный на нагрузке шестерни универсальной металлической рулевой передачи и нагрузке цепи сервопривода, и производительность рулевого механизма достигается.
Рычаг включает 4 MG966R двухподшипниковые металлические шестерни рулевого управления и 2 MG90S металлические шестерни рулевого управления. Соединения рук соединены подшипниками.
Цвет: серебристый + черный
Материал: металл
Размер: Длина: 245 мм
Посылка в комплект входит:
1 * комплект 6 степенью свободы манипулятора (без упаковки, должны быть в сборе)
Обратите внимание
Требует самостоятельной сборки и отладки пользователя
Только вышеуказанный пакет, другие продукты не включены.
Примечание: световая съемка и различные дисплеи могут привести к тому, что цвет изделия на картинке немного отличается от реального. Допускается погрешность измерения: +/-1-3 см.
|
Характеристики
- Материал
- Металл
Сопутствующие товары








