




Описание
Мини-оптический датчик потока Спот зависание управление положение полета Холдинг устойчивый оптический поток модуль Плата для FPV Квадрокоптер Дрон DIY
Формат данных также совместим с снятым продуктом Cheerson CX-OF, уже поддерживаемым ArduCopter.
Примечание:
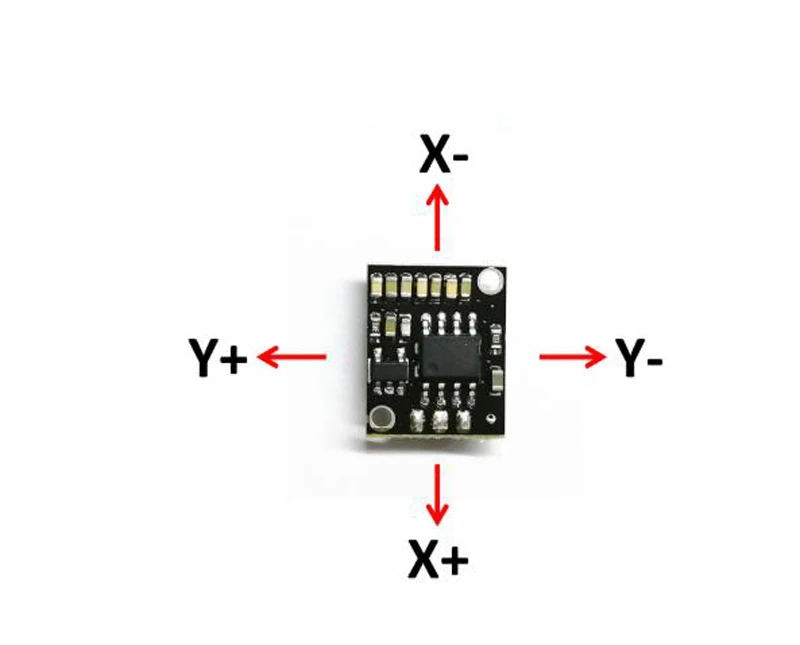
После получения модуля, вам нужно подключить модуль к собственному контролю полета с помощью провода, а затем отрегулировать программы вниз головой.
Вам может потребоваться Электрический паяльник.
Невозможно играть с этим модулем без определенного основания умений.
Пожалуйста, подумайте дважды перед оплатой заказа!
Особенности:
1. Размер: 14x11x5 мм очень маленький, всего 0,6 г, но производительность очень хорошая,. Обычные лампы в помещении также можно использовать на керамической плитке пола
2. Никаких схем! Нет исходный код! Не открывайте исходный код!
Интерфейс модуля и протокол:
Этот модуль отправляет информацию о данных на компьютер через последовательный порт.
Данные характеристики:
A. 8-bit data бит, без проверки бит, 1 бит стоп-бит, скорость передачи данных набор для 19200bps.
B. Частота данных: около 66fps частота кадров для отправки данных хосту.
C. Другие: если смещение двух последовательных кадров слишком маленькое, 0 будет выводиться, и тогда данные будут выводиться, когда перемещения будет достаточно.

Описание:
A. Header-это фиксированные два байта: OxFE (header), 0x04 (количество байтов);
B. DATAO, DATA1-это низкие и высокие восемь битов потока-x, а именно fow-x = (int16) (DATA1 <8) (DATA0):
C. DATA2, DATA3-это низкие и высокие восемь бит потока-y, то есть поток-y = (int (DATA3 <8) (DATA2);
D. последний, кроме одного байта-это контрольный байт, который является накопленным значением четырех байтов data0-data3, то есть SUM = DATAO + DATA1 + DATA2 + DATA3; создание сетей для идентификации и перевода.
Е. Предпоследний байт-качество наземной среды;
F. Последний байт-это Идентификатор Конца пакета, фиксированный как OXAA;
Проверка:
Сначала поставьте на управление полетом. Вот как я его подключил.
Я с помощью электрического паяльника приварил три провода dupont к модулю, а затем напрямую подключил их к последовательному порту управления полетом. Примечание: входное напряжение составляет 3,3-3,6 В. Напряжение слишком низкое для работы модуля и может повредить модуль, если он слишком высок.

В первую очередь
Получение и разбор данных, этот пункт не детализирован, согласно Протоколу связи, чтобы написать код, относительно простой код непосредственно на нем.

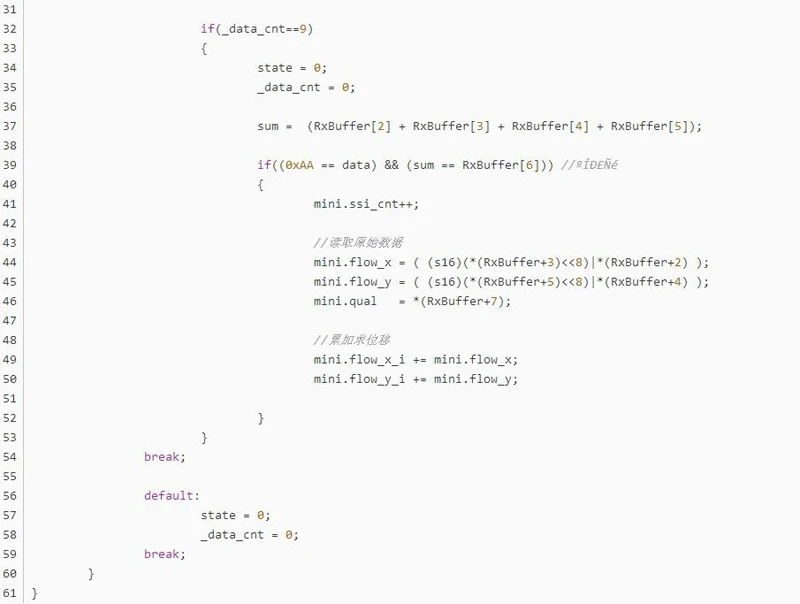
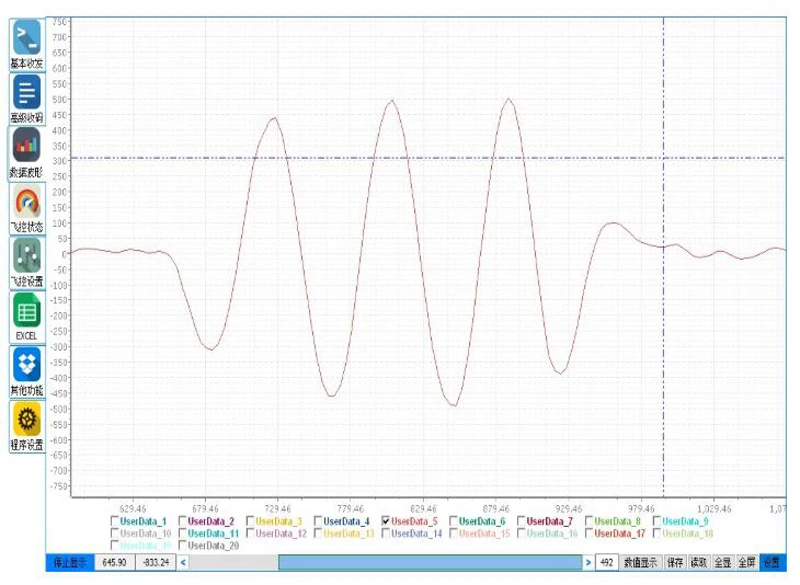
Давайте рассмотрим оригинальную кривую данных оптического потока. Условия тестирования: модуль находится на расстоянии около 20 см от рабочего стола, объектив находится перед рабочим столом, и диапазон вывода данных составляет около +-30:

Во-вторых
Обработка данных оптического потока (так как данные, выходные этим оптическим потоком, не прошли инерционный слив, он должен быть обработан, прежде чем он может быть использован).
На первом шаге к интегральному смещению применяется простой фильтр низких частот.

Шаг 2, интегральное Смещение (# define angle_to_rad 0.0174f/arc) компенсируется углом наклона.

Примечание: 600.0f является важным параметром! Нужно подстраивать медленно, подстраивать под то, как просто рассчитать приемлемое?
Когда плоскость трясется на месте, кривые pixel_flow.fix_x_i и pixel_flow.ang_x могут быть почти одинаковой амплитудой изменения, два смещения друг друга для достижения эффекта компенсации. Или сказать так: кривые pixel_flow.fix_y_i и pixel_flow.ang_y различаются практически на одно и то же количество (обратите внимание, в частности, что Интегральные данные о смещении будут медленно увеличиваться или уменьшаться, когда плоскость катится на месте, что является феноменом интегрального дрейфа и является нормальным).
Кривая pixel_flow.fix_x_i и pixel_flow.ang_x, когда плоскость трясется на месте:

Шаг 3, интегральное смещение дифференцируется для получения скорости 1.

Теперь, некоторые люди могут быть запутаны этим, почему мы дифференцируем скорость вместо того, чтобы просто использовать выход оптического потока как скорость? Причина в том, что выходные данные этого оптического модуля потока не Строго говорят о скорости, а об относительном смещении двух последовательных кадров в пикселях.
Кривая скорости самолета при движении вперед и назад в горизонтальной плоскости:
Цель компенсировать интегральное смещение с углом отношения состоит в том, чтобы сохранить интегральное смещение как можно более постоянным, когда плоскость трясется на месте. Почему мы хотим, чтобы интегральное смещение было максимально постоянным? Просто, потому что самолет трясется на месте, смещение не меняется.
Когда плоскость трясется на месте, Интегральная кривая смещения после компенсации угла наклона показана следующим образом:

Шаг 4. Преобразуйте единицы данных в сантиметры.

На этом этапе обработка данных оптического потока в основном завершена. С двумя параметрами интегрального смещения и дифференциальной скорости, Каскадный PID контроль положения петли и скорости петли в горизонтальной плоскости может быть осуществлен.
Наконец, я предоставлю вам помощник по отладке оптического потока. После подключения мини-оптического модуля потока к компьютеру через модуль последовательного порта, вы можете открыть верхний компьютер для просмотра данных оптического модуля потока и иметь функцию динамического дисплея, что очень удобно! Протокол связи соответствует тому, что описано в этой части.





Характеристики
- Бренд
- SHUAICHI
- Материал
- Комбинированный материал
- Технические характеристики
- Значение 2
- Габаритные размеры
- 14x11x5mm
- Номер модели
- For FPV Quadcopter Drone DIY
- Тип транспорта
- Самолеты
- Расходный материал для инструментов
- others
- Периферийные устройства для дистанционного управления
- Spot Hovering Control Board
- Предназначение
- Транспортные средства и Игрушки Дистанционного уПлита
- Детали для тюнинга и запчасти
- Position Holding Steady Optical Flow Module
- Характеристики
- others
- Детали дистанционного управления и комплектующие
- Mini Optical Flow Sensor
Сопутствующие товары
 Лазерный диапазон RC FPV Дрон паря доска мини")




