

Описание
DIY робот с открытым исходным кодом, автомобильный комплект, автоматическая навигационная тележка, Turtlebot3-Burger Pi3 XL430, двигатель OpenCR, контроллер, робот-игрушка
Turtlebot3 первичный опыт
-Продолжительность: около 40 минут
-Выполнения функции:
-Клавиатура управления
-Gmapping
-Movebase DWA algoritm navigation
-Навыки требования:
-Linux Foundation
Turtlebot3 передового опыта
-Продолжительность: 120 минут или около того
-Выполнения функции:
-Клавиатура управления
Лидар Gmapping алгоритм картирование
Lidar Movebase DWA algoritm navigation
Лидар тарайский алгоритм картирование
Лидар Карто алгоритм картирование
Лидар картограф алгоритм картирование
Следите за
Автоматическая установка для парковки
-Навыки требования:
-Linux Foundation
Аппаратные средства напылением Упаковочный лист:
-1x бургер чехол Комплект
-2х умный Мотор: XL430
-1x контроллер (ROS): OpenCR контроллер
-1x литиевая батарея/зарядное устройство (11,1 В, 1800 мАч)
-1x набор кабелей
-1х SBC одноплатный компьютер: Raspberry Pi 3B + макетная плата
-1x лазерный радар дальномер
-1х карта памяти MicroSD 16G
-1x набор инструментов для сборки
Машина версия:
-Для всей машины, наши сотрудники устанавливали оборудование для вас, устанавливали систему и программное обеспечение turtlebot3.
-Завершите все испытания машины в то же время, и вы можете получить базовый контроль движения и тест на шлемы на кончиках пальцев.
Достижимые характеристики:
-Базовый контроль движения робота, вперед, назад, влево и вправо, in situ
-Gmapping алгоритм картирование
-Автономное навигационное
-Увеличение графики картографического алгоритма
-Увеличение отображения hector algoritm
-Увеличение картографического отображения Карто
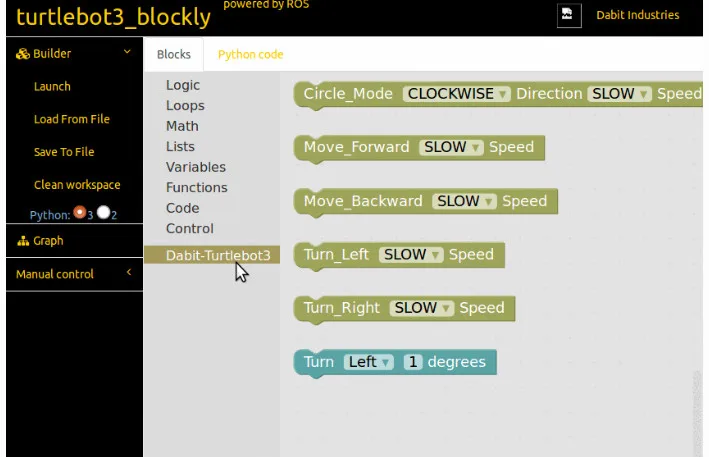
-Добавлены turtlebot3-blockly функции
-Увеличьте панорама осуществления
-Увеличенная функция автоматической парковки
-Добавлен пульт дистанционного управления настольным компьютером
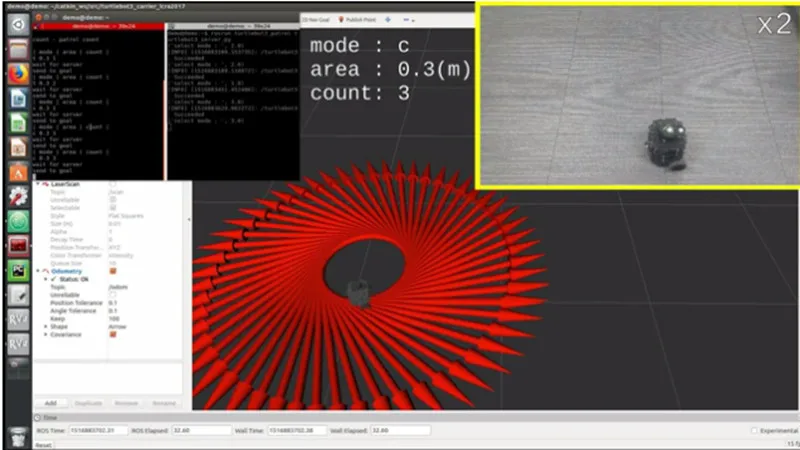
-Увеличение линии патруля функции
-Увеличение фиксированной точки навигации
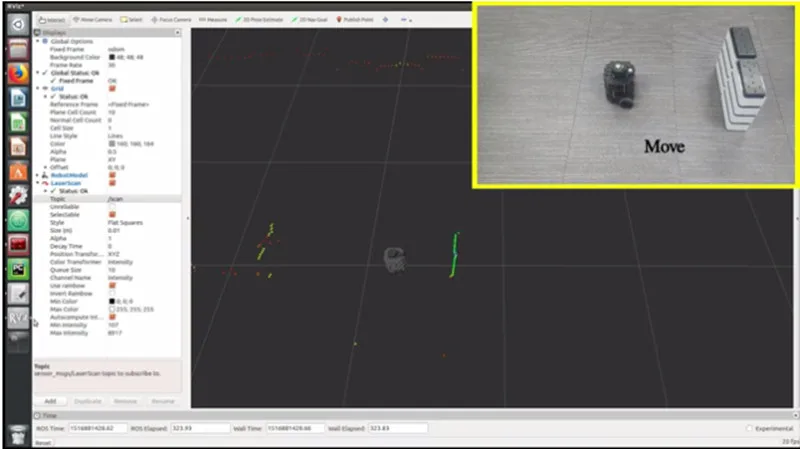
-Увеличьте обнаружения препятствий
Налог на добавленную интерактивный меток

OpenCR

XL430-W250-T

XM430-W210-T

Приводом колеса схема

Опора для PCB плат схема

Шина карта

Вафельный доска схема

TurtleBot3 бургера спецификации
-Максимальная скорость: 0,22 м/с
-Максимальная скорость вращения: 2,84 рад/с (162,72 град/с)
-Максимальная нагрузка: 15 кг
-Размер (ДхШхВ): 138x178x192 мм
-Вес: 1 кг
-Подъем: 10 мм или менее
-Расчетное время работы: 2,5 ч
-Расчетное время зарядки: 2,5 ч
-MCU: 32-битный процессор ARM Cortex M7 с FPU (216 МГц, 462 DMIPS)
-IMU: 3-осевым гироскопом, 3-осевой акселерометр, 3-осевой магнитометр
-Внешний источник питания: 3,3 V/800 ma; 5 V/4A; 12 V/1A
-Расширение pin: GPIO 18-pin; Arduino 32-pin
-Периферийные устройства: UART x3, CAN x1, SPI x1, iec x1, ADC x5, 5pin OLLO x4
-Интерфейс интеллектуального двигателя Dynamixel: RS485 x3; ttl x3
-Звук: программируемый звуковой сигнал
-Программируемый светодиодный: 4
-Светодиодный индикатор состояния: Плата управления x1; батарея x1; Arduino x1
-Кнопка: кнопки x 2, кнопка сброса x 1, переключатель Dip x 2
-Аккумулятор: литий-полимерный 11,1 V 1800 mAh/19,98wh 5C
-Подключение к ПК: USB
-Обновление прошивки: через USB/через JTAG
-Зарядное устройство: Вход 100-240 В, переменный ток, 50/60 Гц, 1.5A max; Выход, работающего на постоянном токе 12 В, 5A
Английский информация:
-Http://turtlebot3.readthedocs.io/en/latest
-Домашнюю страницу http://www.turtlebot.com
-Вики http://turtlebot3.robotis.com
-Github https://github.com/ROBOTIS-GIT/turtlebot3
-Сообщество https://discourse.ros.org
Картограф алгоритм изображения:
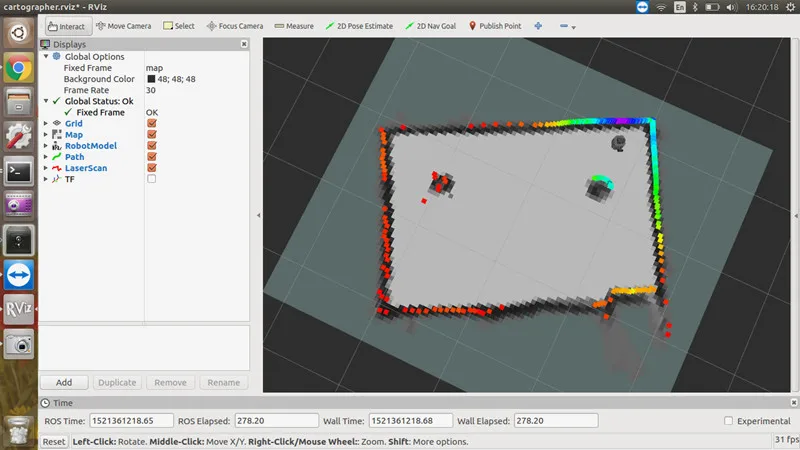
Блок визуализации
Пульт дистанционного управления визуализации

Автоматическая парковка эффект карта

Радиолокационные столкновения препятствия стоп-эффект карта

Характеристики
- Бренд
- jongkhurun
- Тип товара
- Модель
- Серийный номер производителя
- Робот
- Комплектация
- Солдатики
- Степень готовности
- Готовые товары
- Дистанционное управление
- Да
- Пол
- Унисекс
- Размер
- 10 см
- Материал
- Металл
- Предупреждение
- More than 14 years old
- Размеры
- SLAM trolley Turtlebot3-Burger Pi3 XL430 motor OpenCR controller
- Масштаб
- 1/60
- Вид анимации
- Китай
- Версия
- Первое издание
- Возрастной диапазон
- > 14 лет
- Характеристики
- Тема
- Номер модели
- open source robot car kit
- Оригинальная упаковка
- Есть
- Состояние
- Товары в наличии
- Тип куклы
- Модель
- Тема
- Роботы
Сопутствующие товары






