
Описание

Нано Мотор Щит основан на L298P, которая является двойной full-мост драйвер предназначен для езды на автомобиле индуктивные нагрузки, таких как реле, соленоиды, DC и шаговые двигатели. Это позволяет вам управлять двумя электродвигателями постоянного тока с вашим для Arduino наноплата, контролируя скорость и направление каждого самостоятельно. Вы также можете измерить поглощение мотора по току каждого мотора, среди других особенностей.
• Вы можете найти в разделе «Запуск» всю информацию, которую вам нужно настроить вашу плату, использовать для программного обеспечения Arduino (IDE) и начать tinker с кодированием и электроникой.
Технические характеристики
Операционной Напряжение при напряжении от 5 в до 12 В
Контроллер двигателя L298P, дисков 2 двигателя постоянного тока или 1 шаговый двигатель
Максимальный ток 2А на канал или 4А Макс (с внешним источником питания)
Датчик тока 1,65 в/а
Бесплатная остановка хода и функция тормоза
Мощность
NANO Motor Shield должен питаться только от внешнего источника питания. Потому что L298 IC, установленный на Щит имеет два отдельных силовых соединений, одна для логики и один для мотор драйвер питания. Требуемый ток двигателя часто превышает максимальный номинальный ток USB.
Внешний (не-USB) Источник питания может быть от адаптера переменного тока до постоянного тока (настенный) или аккумулятора. Адаптер может быть подключен путем подключения 2,1 мм центрального положительного штекера к разъему питания платы Arduino, на котором установлен моторный щит, или путем подключения проводов, которые направляют блок питания в вин и винтовые клеммы GND, забота о уважением к полярности.
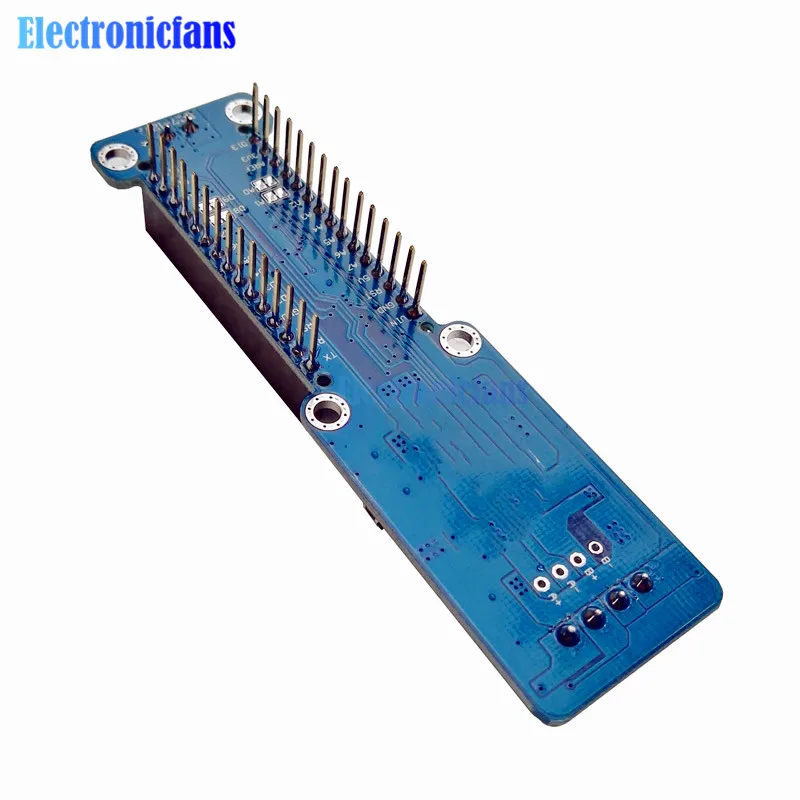
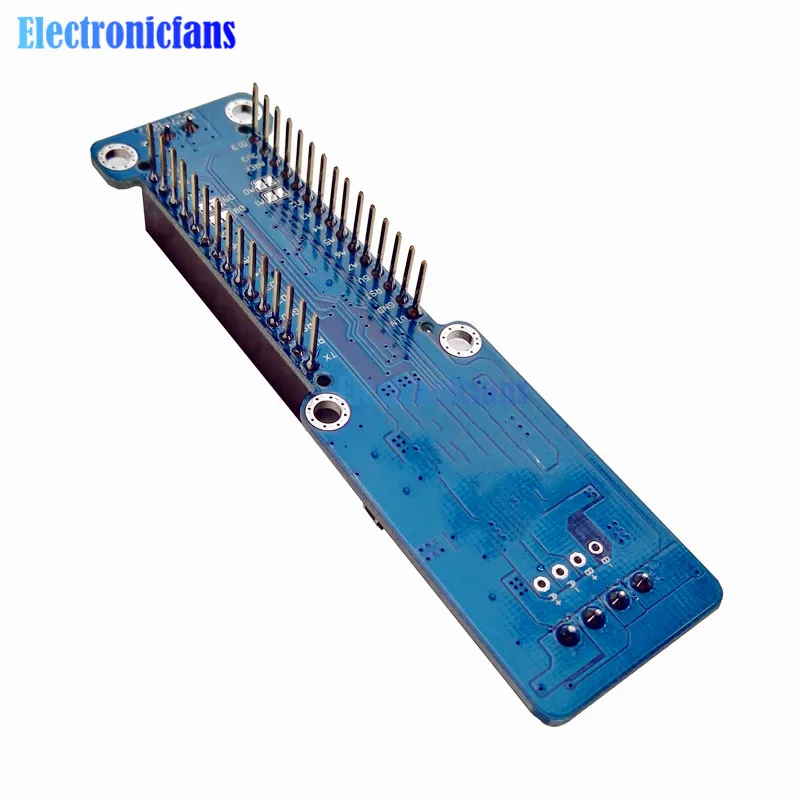
Чтобы избежать возможных повреждений платы Arduino, на которой установлен щит, мы возвращаем с помощью внешнего источника питания, который обеспечивает напряжение от 7 до 12 В. Если для вашего двигателя требуется более 9 В, мы рекомендуем вам отделить линии питания щита и платы Arduino, на которой установлен щит. Это возможно путем резки перемычки «vin-соединение», размещенной на задней стороне щита. Абсолютный предел для винта на винтовых клеммах составляет 18 В.
Щит может поставить 2 Ампера на канал, в общей сложности 4 Ампера максимум.
Вход и Выход
Этот щит имеет два отдельных канала, называемые A и B, которые каждый использует 4 из для Arduino контактов, чтобы управлять или почувствовать мотор. Всего на этом щите 8 контактов. Вы можете использовать каждый канал отдельно для привода двух двигателей постоянного тока или комбинировать их для привода одного биполярный шаговый двигатель. Контакты щита, разделенные по каналу, показаны в таблице ниже:
Функциональные булавки на Ch. Булавки на Ch. B
Направление D12 D13
PWM D3 D11
Тормозной D9 D8
Ток срабатывания A0 A1
Если вам не нужны тормоза и текущее зондирование, вам также нужно больше контактов для вашего приложения, вы можете отключить эти функции, нарезав соответствующие перемычки на задней стороне экрана.
Моторы соединение
Коллекторный двигатель постоянного тока. Вы можете управлять двумя матовыми электродвигателями постоянного тока, соединяя два провода каждого в (+) и (-) Винтовые клеммы для каждого канала A и B. таким образом, вы можете контролировать его направление, установив высокие или низкие контакты DIR A и DIR B, Вы можете контролировать скорость, меняя значения PWM A и PWM B. Тормоза А и тормоза в штырьки, если установить высокий, эффективно тормозят двигатели постоянного тока, а не позволяют им замедляться, нарезав мощность. Вы можете измерить ток, проходящий через двигатель постоянного тока, считывая контакты SNS0 и SNS1. На каждый канал будет напряжение пропорционально измеряемый ток, который может рассматриваться как обычный аналоговый вход переменного тока, с помощью функции analogread () на аналоговые входные A0 и A1. Для Вашего удобства откалибровано до 3,3 В, когда канал обеспечивает максимально возможный ток, то есть 2А.



Характеристики
- Рабочая температура
- -40 TO +85
- Применение
- Компьютер
- Номер модели
- NANO-L298P
- Состояние
- Новый
- Бренд
- diymore
- Напряжение электропитания
- 5V-12V
- Тип
- Регулятор напряжения
- Индивидуальное изготовление
- Да
- Мощность рассеивания
- standard
- Упаковка
- other
Сопутствующие товары





